Industry Application

Global Positioning Systems: Our lives depend on it today. GPS is a satellite-based navigation system, providing location & time information regardless of the weather conditions where there is unobstructed line of sight to multiple GPS satellites. GPS provides extensive and necessary capabilities to commercial, defense and civil users on a continuous basis.
It is highly probable that under certain circumstances, GPS could be rendered unusable. While it is most likely that such an event would be limited to wartime, it is important to understand that GPS impacts all aspects of our lives as it is an integral part of all transportation and communication.
Without GPS, navigation and the ability to determine position coordinates would be limited to the use of a Ring Laser Gyro (RLG) or Fiber Optic Gyro (FOG). While these are different technologies, they both share an operating principle of utilizing two laser beams traveling around a perimeter in opposite directions. The RLG uses an internal laser ring and the FOG uses an external laser with an internal fiber optic ring. Both detect velocity and by integration, can yield location information, without a significant drift.
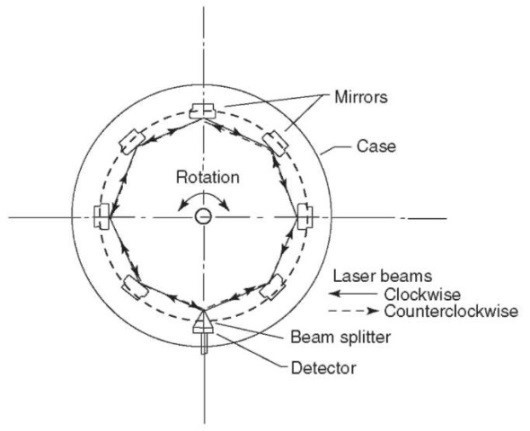
Two beams are circulated around the same path, but in opposite directions. A rate of rotation is established and this creates small differences between the time it takes light to traverse the ring between the two different directions. The beam traveling against the rotation experiences a slightly shorter path delay than the other beam. The resulting phase shift (separation between the frequencies) is measured through interferometry, ultimately translating one component of the angular velocity into a change in the interference pattern. The result is a navigation tool that does not utilize GPS.
There are some differences between RLG and FOG, as it relates to performance and robustness, the common theme is that both technologies are exceptionally expensive. They utilize precisely machined optical parts and require extensive labor content to build and test. This limits the deployment of such devices to applications only where absolutely necessary.
Lower cost MEMS based gyros and accelerometers are smaller, more affordable but are much inferior in respect to drift. Such devices are called Inertial Measurement System (IMU), comprising gyro and accelerometer positioning and north finding (magnetic or other).
A Practical Alternative Solution
Navigation can be achieved by joining elements of existing technology, in a functional and affordable solution. The ability to combine an Inertial Measurement Unit (IMU) and overcoming the drift by “optical flow” or celestial navigation can provide the ability to establish position coordinates when GPS is denied.
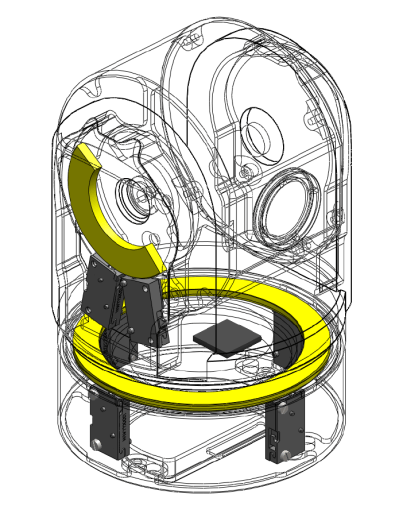
Both optical flow and celestial navigation require a video camera for image capture. The process of integrating an IMU with a Pan & Tilt gimbal that can either use pattern recognition of specific geographic elements (optical flow) or celestial navigation that considers the position of the sun, moon or one of 57 navigational stars, can provide a functional and affordable solution. While a system capable of performing this function does not exist yet, all of the elements of such a system exist in the marketplace. The nanoGimbal 58 is capable of interfacing with an IMU and moving a camera system capable of integrating optical flow / celestial navigation to identify location coordinates. Of special importance is the gimbal fast response and high angular accuracy, facilitating tracking multiple targets while performing optical image stabilization. The nG58 can support various single sensor solutions and ultimately dual sensors. Nanomotion is currently supporting the marketplace with nanoGimbal “building blocks” which provides pan & tilt motion with our motor technology and dual axis drive / control platform with gyro stabilization.

For a complete understanding of system designs and performance levels, please contact Nanomotion at nano@nanomotion.com or +1 (631)585-3000, or visit www.nanomotion.com.
About
Utilizing proprietary technology, Nanomotion designs and manufactures complete motion solutions from start to finish.
Video
Motion Solutions By Industry